Cấu tạo cuộn dây động cơ bước

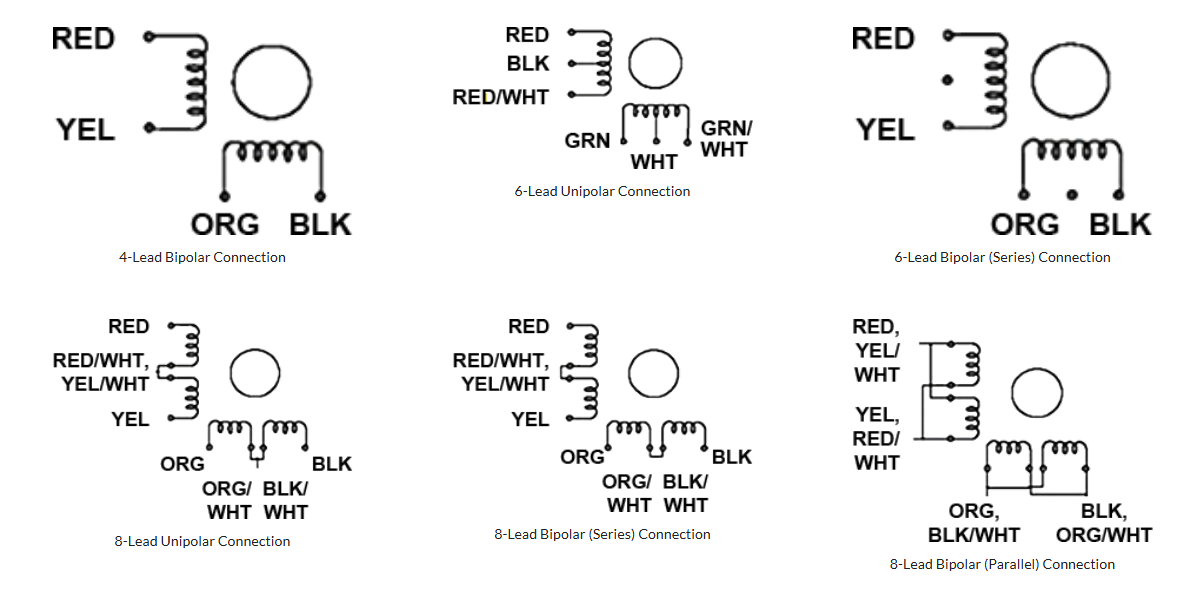
Động cơ bước được quấn trên các cực stato theo cấu hình đơn sợi hoặc lưỡng sợi. Thuật ngữ quấn đơn sợi dùng để chỉ cách quấn động cơ trong đó mỗi cực stato có một cuộn dây; động cơ bước sẽ chỉ có 4 dây dẫn đầu ra. Cấu hình này chỉ có thể được điều khiển từ một drive lưỡng cực.
Thuật ngữ cuộn dây kép dùng để chỉ cách quấn trong đó mỗi cực stato có một cặp cuộn dây giống hệt nhau; động cơ sẽ có 6 hoặc 8 dây dẫn tùy thuộc vào đầu cuối. Cách này đơn giản hóa hoạt động ở chỗ việc truyền dòng điện từ cuộn dây này sang cuộn dây khác, quấn theo hướng ngược lại, đảo ngược vòng quay của trục động cơ. Không giống như quấn đơn sợi chỉ hoạt động với drive lưỡng cực, cấu hình lưỡng sợi có thể được điều khiển bởi trình điều khiển đơn cực hoặc lưỡng cực.
Công thức cho động cơ bước
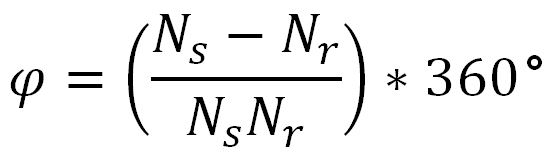
Công thức tính góc bước. Trong đó
- Φ = Góc bước
- Ns = Số răng trên stato
- Nr = Số răng trên rôto
Steps per second = (rpm * steps per revolution)*60. Trong đó
- Bước mỗi vòng (steps per revolution): Động cơ stepper thường có số bước cố định cho mỗi vòng quay, ví dụ 200 bước cho mỗi vòng quay.
- Tốc độ vòng quay (RPM – revolutions per minute): Tốc độ động cơ được đo bằng số vòng quay trong một phút.
- Bước mỗi giây (steps per second): Để tính số bước mỗi giây, chúng ta cần chuyển đổi RPM sang vòng/giây (RPM/60) và nhân với số bước/vòng
Ví dụ:
- Một động cơ 200 bước/vòng quay chạy ở 100 RPM:
- Số bước/giây = 200 * 100 / 60 = 333.33 bước/giây.
- Một động cơ 400 bước/vòng quay chạy ở 200 RPM:
- Số bước/giây = 400 * 200 / 60 = 1333.33 bước/giây.
Tần số cộng hưởng (ω) được tính bằng công thức:
ω = √(K/J)
Trong đó:
ωlà tần số cộng hưởng (rad/s).Klà độ cứng mô-men xoắn. (Một hệ vật lý có độ cứng mô-men xoắn cao sẽ quay trở lại trạng thái cân bằng nhanh chóng khi bị tác động. Điều này dẫn đến tần số cộng hưởng cao hơn)Jlà mô-men quán tính (Một hệ vật lý có mô-men quán tính cao sẽ khó thay đổi vận tốc góc hơn. Điều này dẫn đến tần số cộng hưởng thấp hơn)
Trong động cơ bước, tần số cộng hưởng được xác định bởi độ cứng của động cơ và mô-men quán tính của các bộ phận chuyển động như rotor. Khi động cơ bước hoạt động ở gần tần số cộng hưởng, nó có thể gây ra các vấn đề như rung lắc, dao động và thậm chí là sự cố.
Phân loại Động cơ bước – Stepper Motor
Động cơ bước thay đổi tùy theo ứng dụng về cấu tạo và chức năng. Ba loại động cơ bước phổ biến nhất là: Động cơ bước từ trở biến thiên, Động cơ nam châm vĩnh cửu và Động cơ bước hỗn hợp (Hybrid).
Động cơ bước từ trở biến thiên (Variable Reluctance Stepper Motor)
Động cơ bước từ trở biến thiên là một loại động cơ bước dựa trên nguyên lý từ trở, sử dụng các răng trên stato và rôto để tạo ra chuyển động bước. Rôto của loại động cơ này không có nam châm, nên không có mô men xoắn hãm.
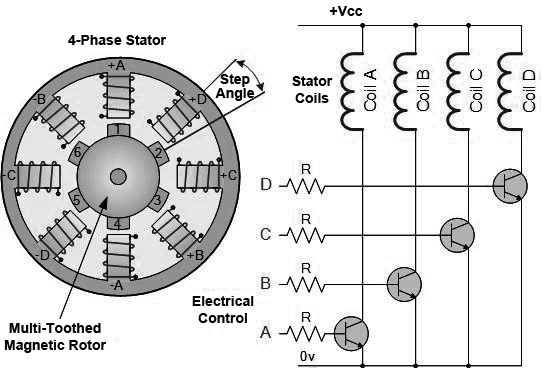
Khi cuộn dây stato được cấp điện, nó sẽ tạo ra từ trường. Các cực được từ hóa, các răng rôto bị hút vào các cực stato được cấp điện và quay để thẳng hàng. Khi các cuộn dây xung quanh pha A của stato được cấp điện, các răng rôto bị hút vào các cực stato, cho phép các cực thẳng hàng. Khi các cuộn dây của pha A mất điện và pha B được cấp điện, rôto quay để răng của nó khớp với răng của stato. Quá trình này tiếp tục theo trình tự với pha C, sau đó pha D được cấp điện, thúc đẩy rôto quay.
Động cơ bước từ trở biến thiên có góc bước nhỏ hơn (ví dụ 0.72 độ, 1.8 độ), cho phép điều khiển chính xác hơn
Ưu điểm:
- Thiết kế đơn giản: Cấu tạo đơn giản hơn so với động cơ bước nam châm vĩnh cửu.
- Chi phí thấp: Dễ dàng sản xuất và có chi phí thấp hơn.
- Độ phân giải góc cao, nhờ bước quay nhỏ.
Nhược điểm:
- Mô men xoắn thấp, đặc biệt ở tốc độ thấp.
- Độ rung và tiếng ồn lớn, hoạt động không mượt bằng các loại khác.
- Yêu cầu điều khiển phức tạp
Động cơ bước nam châm vĩnh cửu (Permanent Magnet Stepper Motor)
Động cơ bước nam châm vĩnh cửu bao gồm các rôto nam châm vĩnh cửu không có răng, được từ hóa vuông góc với trục quay. Bằng cách cấp điện cho bốn pha theo trình tự, rôto quay do lực hút của các cực từ. Động cơ bước được hiển thị trong sơ đồ bên dưới sẽ thực hiện các bước 90 độ khi các cuộn dây được cấp điện theo trình tự theo chiều kim đồng hồ: ABAB. Động cơ bước PM thường có góc bước là 45 hoặc 90 độ và bước ở tốc độ tương đối thấp. Tuy nhiên, chúng thể hiện mô-men xoắn cao và đặc tính giảm chấn tốt.

Ưu điểm
-
Cấu tạo đơn giản, chi phí thấp.
-
Mô-men xoắn cao ở tốc độ thấp, phù hợp cho ứng dụng tải nhẹ.
-
Hoạt động êm, ít rung hơn loại từ trở.
-
Dễ điều khiển, không cần encoder/phản hồi vị trí.
Nhược điểm:
-
Độ chính xác không cao bằng động cơ bước lai (hybrid).
-
Hiệu suất thấp hơn so với các loại cao cấp.
-
Không phù hợp với tải nặng hoặc tốc độ cao.
Hybrid Stepper Motors
Động cơ bước hỗn hợp (Hybrid) kết hợp các đặc tính của cả thiết kế Động cơ bước từ trở biến thiên và động cơ bước nam châm vĩnh cửu. Với rotor nhiều răng giống với động cơ VR và nam châm đồng tâm từ hóa theo trục xung quanh trục của nó, động cơ bước lai cung cấp khả năng tăng mô-men xoắn động, giữ và hãm. So với động cơ bước PM, nó cung cấp khả năng cải thiện hiệu suất về độ phân giải bước, mô-men xoắn và tốc độ. Động cơ bước lai thông thường được thiết kế với góc bước là 0,9°, 1,8°, 3,6° và 4,5°, trong đó 1,8° là góc bước được sử dụng phổ biến nhất. Chúng lý tưởng cho các ứng dụng có tải ổn định với tốc độ dưới 1.000 vòng/phút. Các yếu tố chính được xem xét khi thiết kế để có mô-men xoắn đầu ra tối ưu của động cơ là số lớp, độ chính xác và độ sắc nét của răng và độ bền của vật liệu từ tính.
Ưu điểm
-
Góc bước nhỏ (thường là 0.9° hoặc 1.8°), giúp điều khiển vị trí rất chính xác.
- Nhờ kết hợp nam châm vĩnh cửu và cấu trúc đặc biệt, mô-men xoắn cao hơn so với các loại động cơ bước khác cùng kích thước.
-
Hiệu suất điện – cơ cao hơn so với động cơ biến từ.
-
Khi dừng, động cơ vẫn có khả năng giữ vị trí mà không cần sử dụng encoder.
-
Phản hồi tức thời với tín hiệu điều khiển, thích hợp với hệ thống cần phản ứng nhanh.
-
Không cần bộ cảm biến phản hồi (feedback sensor) trong nhiều ứng dụng.
Nhược điểm
-
Dễ bị rung hoặc gây tiếng ồn, đặc biệt ở tốc độ thấp.
- Hiện tượng mất bước (miss step): Khi tải quá nặng hoặc điều khiển sai, động cơ có thể mất bước vì không có cơ chế phản hồi vị trí.
-
Tốc độ cao làm giảm mô-men xoắn và hiệu suất tổng thể.
- Phải dùng bộ điều khiển (driver) phù hợp để tận dụng hết hiệu năng
Động cơ bước tích hợp hộp số – Stepper Motor with Gearbox
Đây là tổ hợp giữa động cơ bước và hộp số giảm tốc, được thiết kế để tăng mô-men xoắn, giảm tốc độ đầu ra và cải thiện độ chính xác điều khiển vị trí.
Các loại hộp số phổ biến tích hợp với động cơ bước:
| Loại hộp số | Đặc điểm chính | Ứng dụng |
|---|---|---|
| Hành tinh (planetary) | Gọn, mô-men lớn, độ rơ thấp | CNC, robot |
| Cycloidal | Siêu bền, chịu tải nặng, độ chính xác cao | Tự động hóa công nghiệp |
| Spur (bánh răng trụ) | Giá rẻ, đơn giản nhưng có độ rơ lớn | Thiết bị giá rẻ |
Động cơ bước được điều khiển như thế nào?
Một hệ thống động cơ bước gồm 3 phần chính:
-
Bộ điều khiển (Controller hay PLC): tạo ra các tín hiệu xung (step pulse) và chiều quay (direction).
-
Stepper Drive (Driver): nhận tín hiệu từ bộ điều khiển, sau đó kích hoạt các pha cuộn dây tương ứng của động cơ.
-
Động cơ bước (Stepper Motor): thực hiện chuyển động quay theo số bước điều khiển.
Stepper Drive nhận 2 tín hiệu chính: Step (xung bước): mỗi xung tương ứng với một bước di chuyển của động cơ và Direction (hướng): xác định chiều quay (thuận/ngược). Sau đó, Stepper Drive chuyển đổi các xung Step thành chuỗi tín hiệu điều khiển dòng điện qua các cuộn dây theo trình tự chính xác, để tạo ra trường từ quay → rotor bị hút theo các vị trí tương ứng.
Một số chế độ điều khiển như full-step, half-step và microstepping giúp điều chỉnh độ mịn của chuyển động.
Nguyên lý điều khiển động cơ bước
Stepper Motor không quay theo cơ chế thông thường, chúng quay theo từng bước nên có độ chính xác rất cao về mặt điều khiển học. Chúng làm việc nhờ các bộ chuyển mạch điện tử đưa các tín hiệu điều khiển vào stato theo thứ tự và một tần số nhất định. Tổng số góc quay của rôto tương ứng với số lần chuyển mạch, cũng như chiều quay và tốc độ quay của rôto phụ thuộc vào thứ tự chuyển đổi và tần số chuyển đổi.
Có ba chế độ điều khiển thường được sử dụng với động cơ bước: full-step (bước đầy đủ), nửa bước (half-step) và vi bước (microstepping).
Điều khiển full-step
Trong chế độ bước đầy đủ – full-step, động cơ bước qua góc bước bình thường, ví dụ với 200 bước/vòng, động cơ quay 1,8° cho mỗi bước đầy đủ, trong khi ở hoạt động nửa bước, động cơ quay 0,9° cho mỗi bước đầy đủ.
Có hai loại chế độ bước đầy đủ – full-step: kích thích bước đầy đủ một pha và hai pha.
Trong kích thích bước đầy đủ một pha, động cơ bước hoạt động chỉ với một pha được cấp điện tại một thời điểm. Chế độ này thường được sử dụng trong các ứng dụng mà hiệu suất mô-men xoắn và tốc độ ít quan trọng hơn, trong đó động cơ hoạt động ở tốc độ cố định và điều kiện tải được xác định rõ. Các vấn đề về cộng hưởng có thể cản trở hoạt động ở một số tốc độ. Chế độ này yêu cầu lượng điện năng ít nhất từ nguồn điện truyền động trong bất kỳ chế độ kích thích nào.

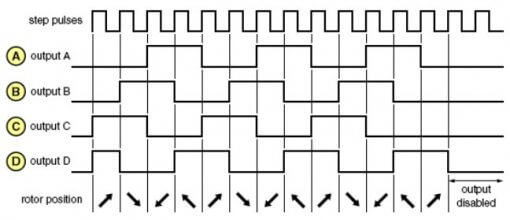
Dạng xung điều khiển bước đầy đủ (phát xung 1 pha)
Trong chế độ kích thích toàn bước hai pha, động cơ bước hoạt động với hai pha được cấp điện cùng một lúc. Chế độ này cung cấp hiệu suất mô-men xoắn và tốc độ tuyệt vời với các vấn đề cộng hưởng tối thiểu.
Dạng xung điều khiển bước đầy đủ (phát xung 2 pha)
Lưu ý: Chế độ bước đầy đủ 2 pha cung cấp mô-men xoắn lớn hơn khoảng 30 – 40% so với 1 pha, nhưng cần gấp đôi công suất từ nguồn điện truyền động.
Điều khiển Half-Step
Chế độ nửa bước xen kẽ giữa các hoạt động pha đơn và pha kép, tạo ra các bước có kích thước bằng một nửa bước thông thường. Do đó, chế độ này cung cấp độ phân giải gấp đôi. Trong khi mô-men xoắn đầu ra của động cơ thay đổi theo các bước xen kẽ, điều này được bù đắp nhiều hơn bởi nhu cầu chỉ bước qua một nửa góc. Chế độ này đã trở thành chế độ được sử dụng chủ yếu nhất, vì nó gần như loại bỏ hoàn toàn khả năng xảy ra các vấn đề cộng hưởng.
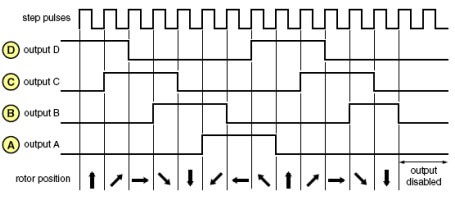
Điều khiển half-step (1 or 2 phase on)
Động cơ bước có thể hoạt động ở nhiều tốc độ khác nhau và điều khiển hầu hết mọi tải thường gặp.
Điều khiển vi bước – Microstepping
Ở chế độ vi bước, góc bước tự nhiên của động cơ bước có thể được phân chia thành các góc nhỏ hơn. Ví dụ, động cơ 1,8 độ thông thường có 200 bước mỗi vòng quay. Nếu động cơ được vi bước ở chế độ ‘chia cho 10’, thì mỗi vi bước sẽ di chuyển động cơ 0,18 độ, trở thành 2.000 bước/vòng. Các vi bước được tạo ra bằng cách chia tỷ lệ dòng điện trong hai cuộn dây theo hàm sin và cos. Chế độ này được sử dụng rộng rãi trong các ứng dụng yêu cầu chuyển động mượt mà hơn hoặc độ phân giải cao hơn. Các chế độ vi bước điển hình nằm trong khoảng từ ‘chia cho 10’ đến ‘chia cho 256’ (51.200 bước/vòng cho động cơ 1,8 độ). Một số trình điều khiển vi bước có bộ chia cố định, trong khi các trình điều khiển đắt tiền hơn cho phép bộ chia có thể lựa chọn.